3 months later...
Experiments have been continuing with Dan-ED. We have finalised on a tracked chassis design as it is much simpler to implement and more robust. There are 4 independent motors, two for each track. This ensures the track can be reliably driven backwards and forwards with no slack in the track. There are also rubber guide wheels, again to ensure no slack and improve drive precision.
Dan-ED is built entirely from lego. This means it is very easy for changes to be made. Drive is provided by 4 Lego power function motors connected to a Moto Zero drive board. Only two of the moto zero outputs are being used - each driving a pair of motors (on each track). We are initially using a Pi Zero, but there is sufficient power from the power pack (8.4v + independently regulated 5v) to drive a Pi 3B+ if necessary.
So far experiments have concentrated on getting the motors running. We are using a Fuze computer, modified by replacing the original Raspberry Pi 2b with a 3b+. We have also modified the I/O so that all GPIO outputs are available for experimenting with. This forms a convenient test bed.
All coding is being done with the moto zero connected to the Raspberry Pi within the Fuze computer. We port the code to the Pi Zero within Dan-ED when ready. We have gone through a lot of re-learning. Previous coding was for an Arduino controller (based on ‘C’ like code). The new code drives Raspberry Pi directly and is Python based.’
So far, the motors are working, we have even managed to integrate a game controller so that the motors can be remotely controlled. Dan-ED also talks (using espeak). But, there is still a lot to do to prepare for the various challenges. The remote control works, so the simpler ‘remote controlled’ challenges will be okay. The ‘autonomous’ challenges will be a lot harder. We are relying on machine vision which has still to be developed! Also Dan-ED has no head yet!
 Danny playing with ‘Dan-ED’! He is very excited about Pi-Wars.
Danny playing with ‘Dan-ED’! He is very excited about Pi-Wars.
 Key components for Dan-ED (Pi Zero, game controller, power pack and some lego ‘tanks’)!
Key components for Dan-ED (Pi Zero, game controller, power pack and some lego ‘tanks’)!
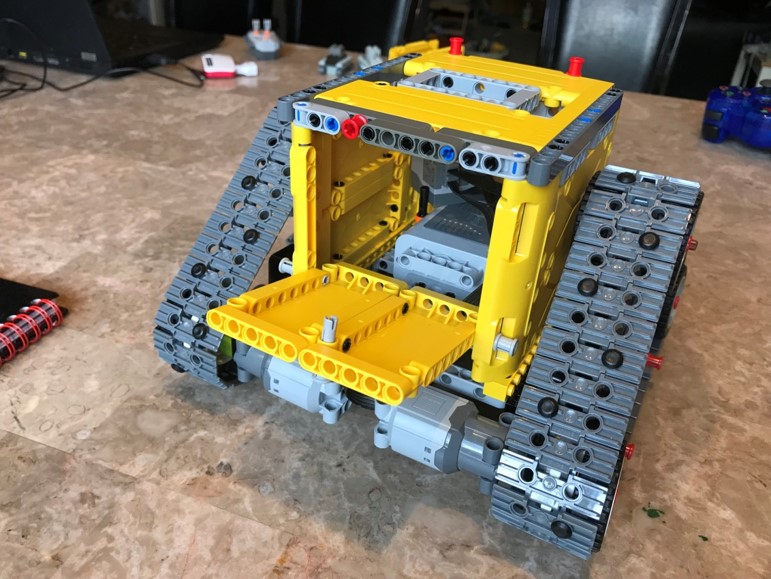
 Dan-ED (top view) - built entirely from lego. We have opted for a tracked design for ease of implementation and robustness.
Dan-ED (top view) - built entirely from lego. We have opted for a tracked design for ease of implementation and robustness.
 Dan-ED (front view) - The Lego power function motors can be seen -two drive each track. Dan-ED is missing his head! We will add this later.
Dan-ED (front view) - The Lego power function motors can be seen -two drive each track. Dan-ED is missing his head! We will add this later.
 Track design with 4 independent motors. Rubber wheels with drive sprockets minimises slack in the track and improves drive precision.
Track design with 4 independent motors. Rubber wheels with drive sprockets minimises slack in the track and improves drive precision.
 There is plenty of space inside Dan-ED for power pack, Moto Zero drive controller and Pi Zero.
There is plenty of space inside Dan-ED for power pack, Moto Zero drive controller and Pi Zero.
 Experimental setup for testing the motor drive controller. Fuze has been modified with a Pi 3B+, to provide more processing. I/O board also modified to facilitate experiments.
Experimental setup for testing the motor drive controller. Fuze has been modified with a Pi 3B+, to provide more processing. I/O board also modified to facilitate experiments.
 ‘Moto Zero’ controller to be used in Dan-ED. There are 4 separate ‘drivers’ but only two are being used (each drives two motors for each track).
‘Moto Zero’ controller to be used in Dan-ED. There are 4 separate ‘drivers’ but only two are being used (each drives two motors for each track).
 We have been documenting our experiments as we have progressed. We have completely switched from Arduino to Pi, which has required learning Python coding.
We have been documenting our experiments as we have progressed. We have completely switched from Arduino to Pi, which has required learning Python coding.
 Learning the GPIO arrangements for Pi was initially tricky. Also Moto Zero was not well documented. We had to trace the whole circuit!
Learning the GPIO arrangements for Pi was initially tricky. Also Moto Zero was not well documented. We had to trace the whole circuit!
 Danny looking at the components of Dan-ED, its complicated!
Danny looking at the components of Dan-ED, its complicated!
So far experiments have concentrated on getting the motors running. We are using a Fuze computer, modified by replacing the original Raspberry Pi 2b with a 3b+. We have also modified the I/O so that all GPIO outputs are available for experimenting with. This forms a convenient test bed.
All coding is being done with the moto zero connected to the Raspberry Pi within the Fuze computer. We port the code to the Pi Zero within Dan-ED when ready. We have gone through a lot of re-learning. Previous coding was for an Arduino controller (based on ‘C’ like code). The new code drives Raspberry Pi directly and is Python based.’
So far, the motors are working, we have even managed to integrate a game controller so that the motors can be remotely controlled. Dan-ED also talks (using espeak). But, there is still a lot to do to prepare for the various challenges. The remote control works, so the simpler ‘remote controlled’ challenges will be okay. The ‘autonomous’ challenges will be a lot harder. We are relying on machine vision which has still to be developed! Also Dan-ED has no head yet!











Comments
Post a Comment